Project Introduction
My team was tasked with designing and manufacturing a compliant end-effector for an actuated robotic arm to pick up an egg without external force modulation—and move it without dropping or cracking it.
Problem Statement
- The end-effector must affix securely to the arm.
- Generate between 6–10 N of force.
- Hold the egg without breaking or dropping it.

Proposed Solution
- Introduce bending compliance because the arm cannot regulate force output precisely.
- Use a cantilever beam to multiply force through leverage and generate a gripping moment.
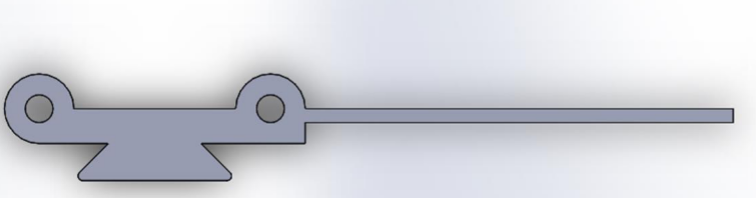
Implementation
- Use a thicker root section for the cantilever to handle peak load.
- Taper the distal region to reduce stiffness and improve conformity.
- Mount via a dovetail rail for alignment and quick swapping.

Finite Element Analysis
- Iteratively narrow the beam to maximize performance while maintaining safety factors.
- Remove low-stress material to reduce weight and improve compliance.
- Fillet edges to minimize stress concentrations at transitions.
