Automating 3D printing with computer vision and robotics
Project Introduction
This project addresses the limitations of typical 3D printing workflows by automating post‑processing tasks using computer vision and a robotic arm. The goal is to create a fully automated system that can monitor print jobs, remove completed prints, and prepare the printer for the next job.
Problem Statement
Traditional 3D printers require constant human supervision for loading and removing prints. Operators need to monitor the printer, remove completed objects, clean the build platform, and restart the process, which slows down production and increases labor costs.
Proposed Solution
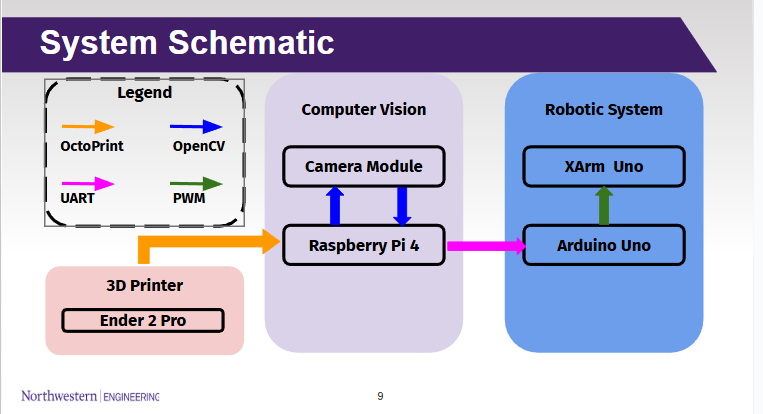
My solution uses a robotic arm OpenCV computer vision algorithm, and uses inverse kinematics to send servo coordinates to the arm.
Implementation
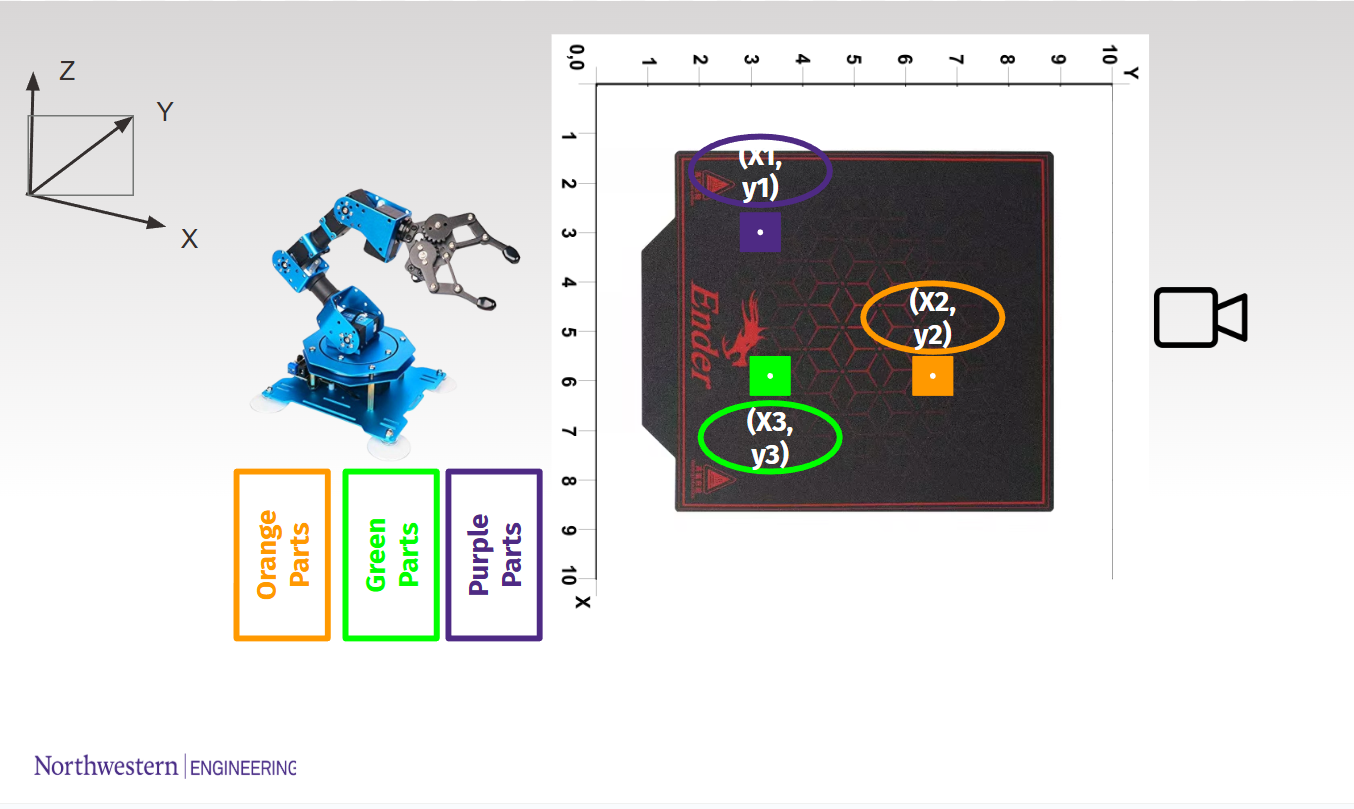
I developed a computer vision module using OpenCV to detect when a print is complete. A custom five‑axis robotic arm equipped with a gripper removes the print from the bed and transfers it to its respective bin for receiving. An Arduino controls the system interfaced with the vision software.
Future Improvements
Future work will focus on adding remote monitoring capabilities, improving the accuracy of the vision system, and integrating the system with automated filament loading and assembly lines for a fully autonomous manufacturing workflow.
Demo Video
Contact
If you'd like to learn more about this project or collaborate, feel free to reach out.